Yaskawa産業シグマ2シリーズ新しい100W ACサーボ モーターSGMPH-01A1A41
記述
- 電気Yaskawa
- ACサーボ モーター
- シグマ2 (Σ-IIシリーズ)
SEPCIFICATIONS
| 製造業者 |
Yaskawa/MagneTek/Saftronics/Omron |
| シリーズ |
シグマ2 (Σ-IIシリーズ) |
| 重量 |
5KG |
同じようなプロダクト
| SGMPH-02A1A-YR12 |
SGMPH-02A1A-YR21 |
| SGMPH-02A1A-YR31 |
SGMPH-02A1A-YR32 |
| SGMPH-02A2A-YR12 |
SGMPH-02A2A-YR21 |
| SGMPH-02AAA2B |
SGMPH-02AAA2C |
| SGMPH-02AAA2E |
SGMPH-02AAA2E |
| SGMPH-02AAA4B |
SGMPH-02AAA61 |
| SGMPH-02BAA21 |
SGMPH-02BAA41 |
| SGMPH-04A1A21 |
SGMPH-02BAAG161 |
| SGMPH-04A1A2B |
SGMPH-04A1A2C |
| SGMPH-04A1A41 |
SGMPH-04A1A4B |
連絡窓口:アナ
電子メール:wisdomlongkeji@163.com
携帯電話:+0086-13534205279
他の優秀なプロダクト
| Yasakawaモーター、運転者SG- |
三菱モーターHC-、HA |
| Westinghouseモジュール1C-、5X- |
エマーソンVE-、KJ- |
| ハネウェル社TC-、TK- |
GEモジュールIC - |
| FanucモーターA0- |
横川町の送信機EJA- |
流れが電子回路のコンダクターに制限される同じ方法の固定子の構造によって定義されるこの高い透磁率のの存在は磁束を道にほとんどの場合制限されるために質料因。これは固定子の棒に変化を集中するのに役立つ。
Portescap.= N N N N S S S 3によって発達するディスク磁石モーターの4.原則を計算しなさい
回転子と固定子間の遅れが付いている2棒のステッピング モーターを通した図5.磁束道。
図6.の単極および両極傷のステッピング モーター。モーターによって作り出されるトルクの出力は巻上げが活気づくとき発生する磁束の強度に比例している。
磁束の強度を定義する基本的な関係は下記によって定義される:
かH = (Nの× i)の÷ l:
N =巻く回転の数
i =現在
H =磁界の強度
l =磁束の路程
この関係は従って磁束の強度がトルク比例しているにことを示し、
磁束道の長さに巻く回転および現在および反比例したの数。
この基本的な関係から1つは同じフレーム サイズのステッピング モーターは巻く変数のことを変更によって非常に異なったトルクの出力機能が単にあることができることを見ることができる。モーターの出力機能に影響を与える巻く変数が「ドライブ回路基本原則」と資格を与えられるアプリケーション ノートで見つけることができるか方法の詳細情報。
設定要素
(a)コントローラーはコントローラーSynqNetネットワークのホストである。そこにネットワークに対して1つのコントローラーただべきである。
(b)ノードはノード奴隷およびないコントローラー、特に明記しない限りである。
(c)ターミネーターひもの地勢学にノード鎖の端に置かれる任意ループバックのコネクター。
地勢学
SynqNetはネットワーク・ノードがSynqNetのコントローラーに戻ってシリーズで接続されるリング地勢学を支える。リング地勢学では、1つのケーブルかノードが失敗すれば、ネットワークは壊れ目のまわりでパケット データの方向を変え、でき事の適用を知らせる。壊れ目の位置は適用によって定めることができる。
ひもの地勢学は(開くか、または終わる)またネットワーク・ノードがSynqNetのコントローラーに戻って接続されないところで支えられる。ケーブルが壊れれば、下流のノードは壊れ目からもはやコントローラーに出入する送信/受信の包みにできない。最後のノードのターミネーターを使用する利点はコントローラーが決定論的にネットワークの最後のノードを見つけることができるのでネットワークの初期設定の時間が減ることである。ひもの地勢学のタイプは両方とも欠陥回復を支えない。
循環応答はすべての循環応答あらゆる制御周期受け取られ、ノード応答の緩衝で利用できる。
(1)コミュニケーションが活発であることドライブ準備ができたショー。有効いつも。
(2)連続エンコーダーが同期モードで正しく伝達し合っていることエンコーダーの準備ができたショー。ドライブ準備ができた応答が現われる時有効。
(3) Ampはモーター電圧がservoを運転して利用できることショーに動力を与えた。ドライブ準備ができた応答が現われる時有効。
(4) servoが可能にされるか、または不具であることショーでサーボ。ドライブが動的にブレーキがかかることを離れてまたはによってPWMを回すことによって不具なら置かれない。ドライブが用意するとき有効置かれる。
(5)トルクの限界はトルクの参照がトルクの限界にあることを示す。ドライブ準備ができた応答が現われる時有効。
(6)警告は欠陥か間違いを防ぐために注意が取られなければならないことを警告する。有効いつも。
(7)欠陥は欠陥がアンプを締めたことを示す。欠陥の原因を定めるためには、エラー・コードは記憶操作を使用して読まれる必要がある。有効いつも。
(8)位置のフィードバックはあらゆる制御周期で32ビット位置の価値を戻す。
(9)あらゆる制御周期のトルク価値が戻ることをMonitor_A/トルクのエコーは示す。
(10) Monitor_C/Multi-turnデータは16ビットのmulti-turnデータ値を戻す。


 メッセージは20〜3,000文字にする必要があります。
メッセージは20〜3,000文字にする必要があります。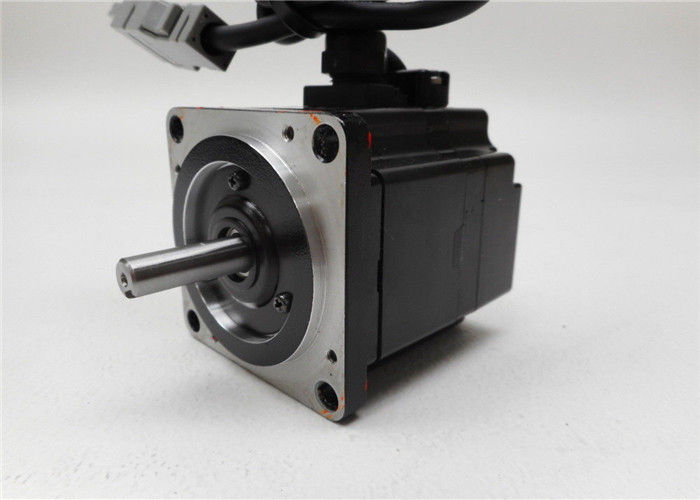
総格付け
評価のスナップショット
すべての評価の分布は以下の通りですすべてのレビュー