産業用サーボモーター ヤスカワ電気 4500 W 1500 RPM サーボモーター SGMDH-45A2B-YR14
速やかな詳細
モデルSGMDH-45A2B-YR14
製品タイプ ACサーボモーター
定数出力 4500w
定数トルク28.4Nm
定速 1500RPM
電源電圧 200vAC
定位電流 32.4Amp
他の上級製品
ヤサカワ・モーター,ドライバー SG- 三?? モーター HC-HA-
ウェスティングハウス・モジュール1C,5X エマーソン VE,KJ
ハニーウェル TC-TK-ファヌックモーター A0-
ローズマウントトランスミッター3051- 横川トランスミッターEJA-
類似した製品
| SGMDH |
記述 |
製造者 |
| SGMDH-056A2A-YR25 |
SGMDH056A2AYR25 サーボモーター |
ヤスカワ |
| SGMDH-06A2 |
SGMDH06A2 サーボモーター |
ヤスカワ |
| SGMDH-06A2A-TR25 |
SGMDH06A2ATR25 サーボモーター |
ヤスカワ |
| SGMDH-06A2A-YR |
SGMDH06A2AYR サーボモーター |
ヤスカワ |
| SGMDH-06A2A-YR11 |
SGMDH06A2AYR11 サーボモーター |
ヤスカワ |
| SGMDH-06A2A-YR12 |
SGMDH06A2AYR12 サーボモーター |
ヤスカワ |
| SGMDH-06A2A-YR13 |
SGMDH06A2AYR13 サーボモーター |
ヤスカワ |
| SGMDH-06A2A-YR14 |
SGMDH06A2AYR14 サーボモーター |
ヤスカワ |
| SGMDH-06A2A-YR24 |
SGMDH06A2AYR24 サーボモーター |
ヤスカワ |
| SGMDH-06A2A-YR25 |
SGMDH06A2AYR25 サーボモーター |
ヤスカワ |
| SGMDH-06A2A-YR26 |
SGMDH06A2AYR26 2.63NM 550W 4AMP 2000RPM 200V |
ヤスカワ |
| SGMDH-12A2 |
SGMDH12A2 サーボモーター |
ヤスカワ |
| SGMDH-12A2A-YA14 |
SGMDH12A2AYA14 サーボモーター |
ヤスカワ |
| SGMDH-12A2A-YR |
SGMDH12A2AYR サーボモーター |
ヤスカワ |
| SGMDH-12A2A-YR12 |
SGMDH12A2AYR12 サーボモーター |
ヤスカワ |
| SGMDH-12A2A-YR13 |
SGMDH12A2AYR13 AC 2000RPM 1150W 200V 7.3AMP 5.49NM |
ヤスカワ |
| SGMDH-12A2A-YR14 |
SGMDH12A2AYR14 サーボモーター |
ヤスカワ |
| SGMDH-12A2A-YR15 |
SGMDH12A2AYR15 サーボモーター |
ヤスカワ |
| SGMDH-12A2A-YR21 |
SGMDH12A2AYR21 サーボモーター |
ヤスカワ |
| SGMDH-12A2A-YRA1 |
SGMDH12A2AYRA1 サーボモーター |
ヤスカワ |
| SGMDH-13A2A-YR23 |
SGMDH13A2AYR23 サーボモーター |
ヤスカワ |
| SGMDH-20A2A21 |
SGMDH20A2A21 サーボモーター |
ヤスカワ |
| SGMDH-22A2 |
SGMDH22A2 サーボモーター |
ヤスカワ |
| SGMDH-22A2A-YR11 |
SGMDH22A2AYR11 シグマII 2.2KW L/U AXIS SK45X |
ヤスカワ |
| SGMDH-22A2A-YR12 |
SGMDH22A2AYR12 サーボモーター |
ヤスカワ |
| SGMDH-22A2A-YR13 |
SGMDH22A2AYR13 サーボモーター |
ヤスカワ |
| SGMDH-22A2A-YR13YA |
SGMDH22A2AYR13YA サーボモーター |
ヤスカワ |
| SGMDH-22A2A-YR14 |
SGMDH22A2AYR14 サーボモーター |
ヤスカワ |
| SGMDH-22A2A-YR32 |
SGMDH22A2AYR32 サーボモーター |
ヤスカワ |
| SGMDH-22ACA61 |
SGMDH22ACA61 サーボモーター |
ヤスカワ |
| SGMDH-30A2A-YR31 |
SGMDH30A2AYR31 サーボモーター |
ヤスカワ |
| SGMDH-30A2A-YR32 |
SGMDH30A2AYR32 サーボモーター |
ヤスカワ |
| SGMDH-32A2 |
SGMDH32A2 サーボモーター |
ヤスカワ |
| SGMDH-32A2A |
SGMDH32A2A サーボモーター |
ヤスカワ |
| SGMDH-32A2A-YA14 |
SGMDH32A2AYA14 サーボモーター |
ヤスカワ |
| SGMDH-32A2A-YR11 |
SGMDH32A2AYR11 サーボモーター |
ヤスカワ |
| SGMDH-32A2A-YR12 |
SGMDH32A2AYR12 サーボモーター |
ヤスカワ |
| SGMDH-32A2A-YR13 |
SGMDH32A2AYR13 AC 3.2KW SIGMA 2 S軸 |
ヤスカワ |
| SGMDH-32A2A-YR14 |
SGMDH32A2AYR14 サーボモーター |
ヤスカワ |
| SGMDH-32A2A-YR51 |
SGMDH32A2AYR51 サーボモーター |
ヤスカワ |
| SGMDH-32A2A-YRA1 |
SGMDH32A2AYRA1 サーボモーター |
ヤスカワ |
| SGMDH-32ACA-MK11 |
SGMDH32ACAMK11 サーボモーター |
ヤスカワ |
| SGMDH-32P5A |
SGMDH32P5A サーボモーター |
ヤスカワ |
| SGMDH-40A2 |
SGMDH40A2 サーボモーター |
ヤスカワ |
| SGMDH-40A2A |
SGMDH40A2A サーボモーター |
ヤスカワ |
| SGMDH-40ACA21 |
SGMDH40ACA21 サーボモーター |
ヤスカワ |
| SGMDH-44A2A-YR14 |
SGMDH44A2AYR14 サーボモーター |
ヤスカワ |
| SGMDH-44A2A-YR15 |
SGMDH44A2AYR15 サーボモーター |
ヤスカワ |
| SGMDH-45A2A6C |
SGMDH45A2A6C サーボモーター |
ヤスカワ |
| SGMDH-45A2B61 |
SGMDH45A2B61 サーボモーター |
ヤスカワ |
| SGMDH-45A2BYR |
SGMDH45A2BYR サーボモーター |
ヤスカワ |
| SGMDH-45A2B-YR13 |
SGMDH45A2BYR13 サーボモーター |
ヤスカワ |
| SGMDH-45A2BYR14 |
SGMDH45A2BYR14 サーボモーター |
ヤスカワ |
| SGMDH-45A2B-YR14 |
SGMDH45A2BYR14 サーボモーター |
ヤスカワ |
| SGMDH-45A2BYR15 |
SGMDH45A2BYR15 サーボモーター |
ヤスカワ |
| SGMDH-45A2B-YR15 |
SGMDH45A2BYR15 サーボモーター |
ヤスカワ |
| SGMDH-6A2A-YR13 |
SGMDH6A2AYR13 サーボモーター |
ヤスカワ |
| SGMDH-6A2A-YR25 |
SGMDH6A2AYR25 サーボモーター |
ヤスカワ |
| SGMDH-A2 |
SGMDHA2 サーボモーター |
ヤスカワ |
| SGMDH-A2A |
SGMDHA2A サーボモーター |
ヤスカワ |
• コンピュータ内の速度ループと位置ループを閉じることで,両方のため単一のフィードバック装置を使用できます.速度ループのために非常に高い更新率が選択されている場合,軸ごとにコンピュータアプローチは有益です高速更新ループでは中央コンピュータの負荷が大きすぎる可能性があります.
• 調整された動きが多く予想される場合,中央コンピュータは各軸に直接アクセスできます.コンピュータ間通信リンクは 緊密な連携を制限する遅延を引き起こします速度ループは,これを容易にするために中央コンピュータのアプローチとアナログのままであることができます.
下の図のようなボード図は,Aと刺激の周波数との関係を示すことで,出力 (またはフィードバック (F) がコマンド (C) にどの程度従うかを定量化するのに役立ちます.周波数は通常,ラディアン/秒で表される.. (ω) は,秒あたり (f) のサイクルではなく, ω = 2πf ≈ 6.28 f であるため,どちらかから他方へ変換するのは簡単である.また,1/ω は,秒で,帯域幅f の低通行フィルターの時間定数である.サーボの帯域幅 (ω) を知ったら対応フィルターの時間定数 (1/ω) を知っており,ステップ入力に対する反応を予測することができる.
ステップモーターは何のために使われますか?
位置付け ステップパーが正確な繰り返しステップで移動するので,正確な動作を必要とするアプリケーションで優れている
3Dプリンター,CNC,カメラプラットフォーム,X,Yプロッターなどの位置付け.一部のディスクドライブでは,読み書きヘッドの位置付けのためにステップモーターも使用します.
運動の正確な増加も,回転速度の優れた制御を可能にします
プロセス自動化とロボット工学
低速トルク - 普通の直流モーターは,低速で非常に多くのトルクを持っていない. ステップモーターは
低速で最大トルク,低速で高速で低速を要求するアプリケーションに良い選択です
精度です
モーション制御の多くのユーザーは,ベンダーがボード図を用いて特定のサーボ機能を説明しようとするのを聞いたことがある. 動きに対処するために基本的な理解が必要である. まず,"Bo-dee"と発音するこの2つの数字の間の類似点 (誰を騙しているのか?), 例えば10という数字がある.

 メッセージは20〜3,000文字にする必要があります。
メッセージは20〜3,000文字にする必要があります。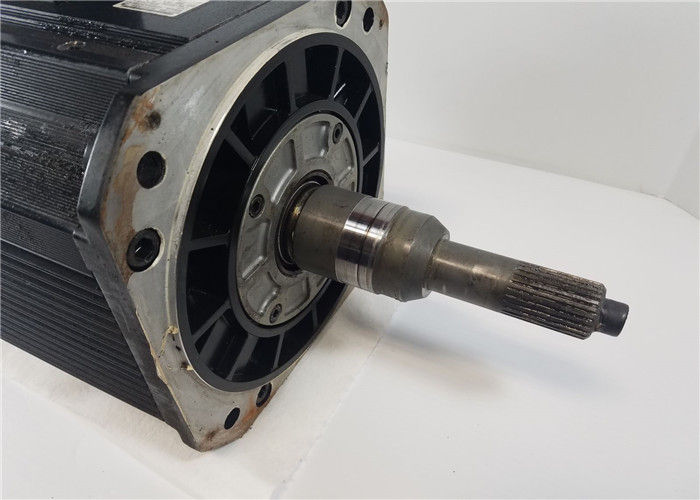
総格付け
評価のスナップショット
すべての評価の分布は以下の通りですすべてのレビュー