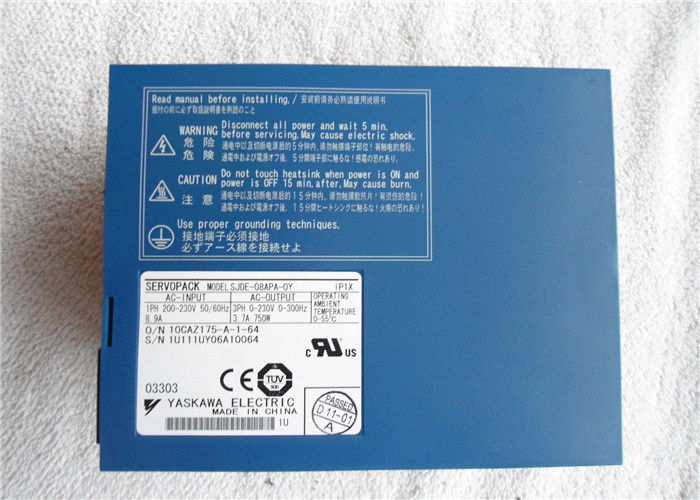
新品とオリジナル 工業用ヤスカワ セルボック200-230V SJDE-08APA-OY NEW IN BOX
記述
- 産業用サーボドライブ
- サーボパック
- サーボコントローラ
詳細について
入力主電圧 200-230V
入力コンット電圧: 200-230V
入力 ミャン PH: 1
入力ミャン 周波数:50/60HZ
入力ミアン電流: 4.8A
出力:400W
出力電圧: 0-230V
出力電流: 2.0A
出力周波数:0~300Hz
出力PH:3
温度: 0~55°C
原産地:日本
効率:IE 1
類似した製品
SJDE-01APA
SJDE-02APA
SJDE-04APA
SJDE-04APA+SJME-04AMB41
SJDE-08APA
SJME-01AMA41
SJME-04AMA41
SJME-04AWA41
SJME-08AWA41
実際には 機械には ステップコマンドを入れたくないのです もちろん ステップが小さすぎて 損傷しない限りですシステムの性能を決定するステップ応答の使用は,主に伝統的なものです.P.I.V.制御の構造と,その問題について,P.I.D.制御は,システムに未知の障害を拒絶するように設計されています.図1は,この未知のトルク障害を示しています.Td サーボモーターモデルの一部として.
障害の拒絶特性
モーターが最終位置を保持している場合と 特定の周波数で未知の干渉がモーターシャフトに適用されている場合を考慮すると シャフトがどのように反応するかを予測できますか?P の効果をグラフィカルに定量化するためにこの障害トークの IV 増幅により,特定の軸の動きを生むために,与えられた周波数で必要な障害の大きさを示す障害拒絶グラフが描かれます.5 は,恒常ダッピングと変動帯域幅の2つの例を示しています.5a) 帯域幅が一定でダッピングが変動する
低周波拒絶増幅は帯域幅値が上昇するにつれて増加する.高周波拒絶の注意事項,サーボコントローラーの帯域幅に関係なく,モーターの慣性だけが有効です.動作を行うために全体的なトルクがより多く求められる犠牲にもなる.類似した障害物拒絶傾向は,図5bに示されています.ここに減圧比が上昇するにつれて,中周波の排斥増幅はわずかに増加する.

他の上級製品
| ヤサカワ・モーター ドライバーSG |
三?? 自動車 HC-HA- |
| ウェスティングハウス モジュール1C,5X- |
エマーソン VE,KJ- |
| ハニーウェル TC-TK- |
GE モジュールIC - |
| ファンクモーター A0- |
横川発信機 EJA |
連絡先:アンナ
メール: wisdomlongkeji@163.com
携帯電話: +0086-13534205279

 メッセージは20〜3,000文字にする必要があります。
メッセージは20〜3,000文字にする必要があります。