YASKAWA SGMAH Sigma II 0.91A 100W ACサーボモーター 3000RMP SGMAH-01AAA41-Y1
仕様
メーカー:Yaskawa
製品番号: SGMAH-01AAA41-Y1
説明:SGMAH-01AAA41-Y1は、Yaskawa製のモーター-ACサーボです。
サーボモータータイプ:SGMAH Sigma II
定格出力:10W(0.07HP)
電源:200V
エンコーダ仕様:13ビット(2048 x 4)インクリメンタルエンコーダ; 標準
改訂レベル:標準
シャフト仕様:キー溝なしのストレートシャフト
付属品:標準; ブレーキなし
オプション:なし
タイプ:なし
その他の優れた製品
Yasakawaモーター、ドライバーSG- 三菱モーターHC-,HA-
Westinghouseモジュール1C-,5X- Emerson VE-,KJ-
Honeywell TC-,TK- FanucモーターA0-
Rosemountトランスミッター3051- YokogawaトランスミッターEJA-
S類似製品
SGMAH-A5A1A21
SGMAH-A5A1A2C
SGMAH-A5A1A2E
SGMAH-A5A1A41D
SGMAH-A5A1A4C
SGMAH-A5A1A-YR11
SGMAH-A5A1A-YR31
SGMAH-A5A1F21
SGMAH-A5A1F2C
SGMAH-A5A1F2CD
SGMAH-A5A1F41
SGMAH-A5A4F41
SGMAH-A5AAA21
SGMAH-A5AAA2B
SGMAH-A5AAA61D
SGMAH-A5AAA61D-OY
SGMAH-A5AAAG161
SGMAH-A5AAAG761
SGMAH-A5AAAG761D
SGMAH-A5AAAH161
ステッピングモーターは、特定のステップレートで共振と呼ばれる現象を示すことがよくあります。これは、特定の速度でトルクが突然失われたり低下したりする現象として見られ、ステップ抜けや同期の喪失につながる可能性があります。これは、入力ステップパルスレートがローターの自然振動周波数と一致した場合に発生します。多くの場合、100~200 pps領域と、高いステップパルスレート領域に共振領域があります。ステッピングモーターの共振現象は、その基本的な構造に起因するため、
完全に排除することはできません。また、負荷条件にも依存します。ハーフステップまたはマイクロステップモードでモーターを駆動することにより、軽減できます。
ステッピングモーターに1つのステップパルスが印加されると、ローターは上記の曲線で定義されたように動作します。
ステップ時間tは、最初のステップパルスが印加されてからモーターシャフトが1ステップ角度回転するのにかかる時間です。
このステップ時間は、トルクと慣性(負荷)の比率と、使用されるドライバーの種類に大きく依存します。
トルクは変位の関数であるため、加速度も同様です。したがって、大きなステップ増分で移動すると、高いトルクが発生し、その結果、高い加速度が発生します。これにより、図のようにオーバーシュートやリンギングが発生する可能性があります。整定時間Tは、これらの振動またはリンギングが停止するのにかかる時間です。特定のアプリケーションでは、この現象は望ましくない場合があります。ステッピングモーターをマイクロステップすることにより、この動作を軽減または排除することが可能です。マイクロステップの詳細については、マイクロステップノートを参照してください。

 メッセージは20〜3,000文字にする必要があります。
メッセージは20〜3,000文字にする必要があります。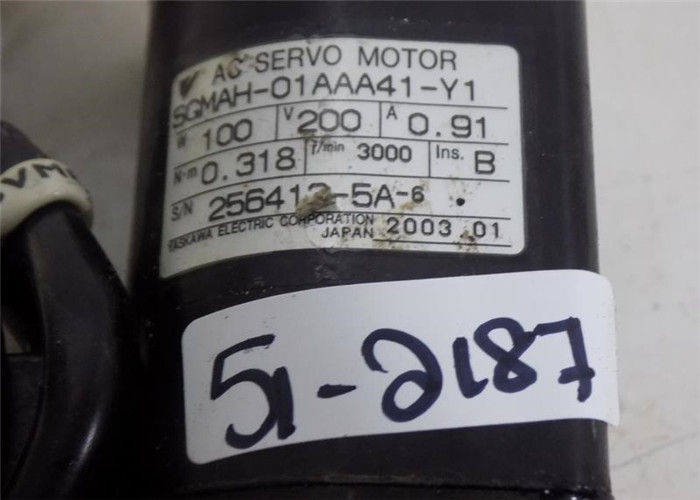
総格付け
評価のスナップショット
すべての評価の分布は以下の通りですすべてのレビュー